
Adobe Illustrator
Autodesk Fusion
This design is based on an origami structure that folds and unfolds gently and is powered by a servo motor. The string is attached to the second to last flap of the origami design and is connected to a servo motor which rotates 90 degrees to pull both strings down, creating a fluid, flying motion. This is all powered by a DFRobot Mini BLE board running on Arduino IDE.
The design starts with a 16 fold diagonal division as described in Folding for Designers. The paper is then folded in the middle to create a sharp angle, resembling a wing. The two center flaps are then glued together to create a tight center.

The servo motor rotates from 90° to 180° which allows for the string to be extended at full length at 180° creating the open wing and shortest length creating a folded wing at 90°.
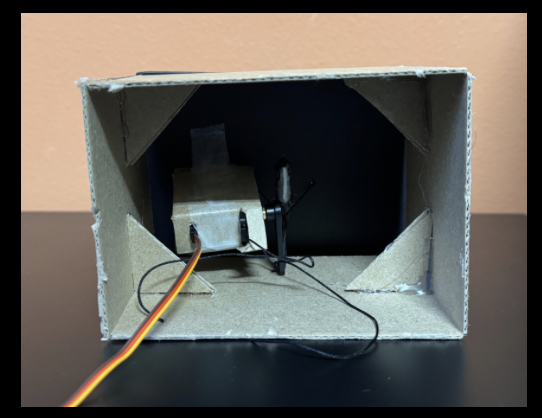
servo motor
There were several challenges in building this prototype. Initially, a paperclip was used to hold the origami tension, but embedding it into the foam core solved the issue. Multiple servo motor prototypes were tested before settling on a properly measured cutout that secured the motor to the box. An attempt to use two origami designs for a larger wing failed due to a weak string mechanism. Lastly, the wire getting caught on the motor was fixed by repositioning the servo and adding a knot in the elastic string.
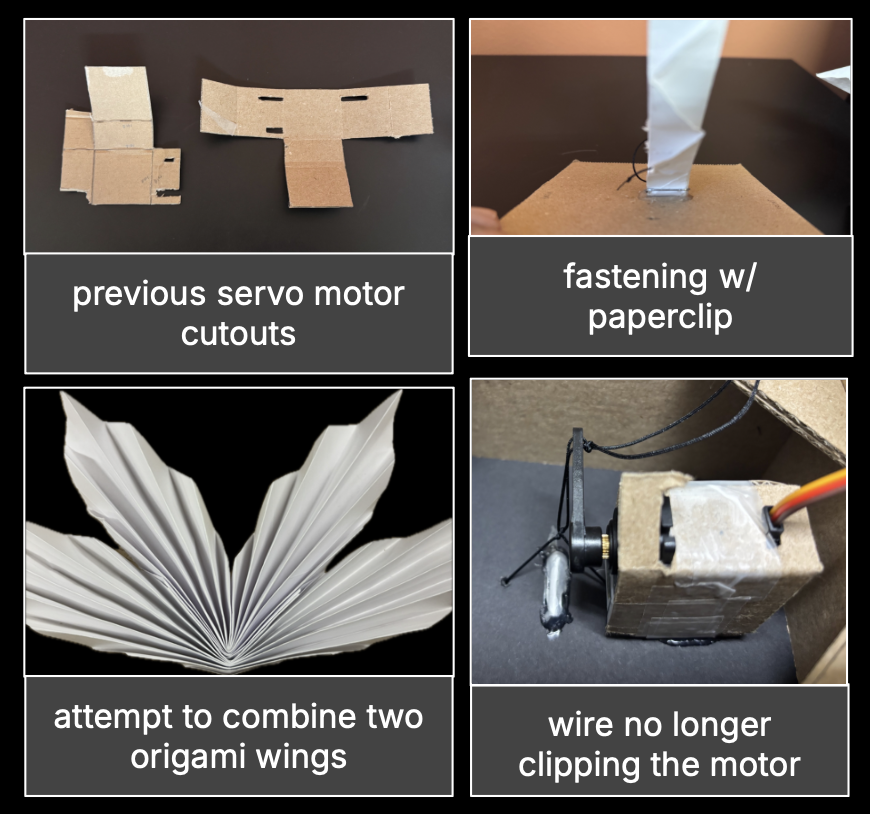
challenges

practicing making gears!